Je ne pige pas ta remarque, Piem.Pas de niveau correct en RSSI, ben, là, stand by.Heu... si on neutralise le RFin par le RSSI qu'est ce va mettre la voiture en stand by ? Car c'est le but non ?
Si le niveau revient, hop, RFin. Non ?

Je ne pige pas ta remarque, Piem.Pas de niveau correct en RSSI, ben, là, stand by.Heu... si on neutralise le RFin par le RSSI qu'est ce va mettre la voiture en stand by ? Car c'est le but non ?
Ok, mais ça suppose alors que c'est toujours la surveillance du hi2flag qui met en stand by.Je ne pige pas ta remarque, Piem.Pas de niveau correct en RSSI, ben, là, stand by.
Si le niveau revient, hop, RFin. Non ?


#PICAXE 20M2
'#################################################################################
'########################## Programme Emetteur #############################
'#################################################################################
'########################## configuration ################################
' B_ pour Broche, c'est le nom ou est branché le composant
' E_ pour Etat, c'est la valeur de la broche
' V_ pour variable, ou est enregistrée l'Etat de la broche
'b0 à b7 pour les infos envoyés
'b8 avertissement des piles
'b9 calcul des joysticks
'b10 sauvegarde des TOR
symbol B_DONNEE = B.0
symbol B_Led = C.0
symbol B_Pile = C.1
symbol B_EN = C.7
symbol E_debutant = pinB.1
régulation E_chgt = pinB.2
symbol E_sirene = pinB.4
symbol E_Phare = pinB.6
symbol E_Gyro = régulation.7
symbol E_Opt = pinC.4
symbol E_Klax = pinC.5
symbol E_camera = pinC.6
symbol V_Joystick = w13
symbol V_Pile = b8
symbol Compteur_Joy = b9
dirsB = %00000001 'declare B.0 en sortie
dirsC = %10000001 'declare C.0 et C.7 en sortie
'########################## Initialisation ################################
setfreq m32 'Mets la freq à 32Mhz, RFout se met a 4 mzh puis repasse à 32Mhz
Compteur_Joy = 0 ' RAZ du compteur joysticks
b10 = b0 ' Initialisation de l'etat des interupteurs
low B_EN ' On desactive le TX au depart
'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
readadc C.3,b1 'Av/ar voiture
readadc C.2,b3 'Dr/ga voiture
readadc B.3,b5 'pan de la caméra
readadc B.5,b7 'Tilt de la caméra
readadc B_pile, V_Pile ' Lecture valeur des piles
if V_Pile < 90 then ' Avertissement piles usagées
high B_Led ' Correspond a 7 V au lieu de 7.2V
end if
V_Joystick = b1+b3+b5+b7 ' Calcul de la position des joysticks
if V_Joystick>507 and V_Joystick<511 and b10=b0 then ' point milieu 126+125+129+129 = 509
inc Compteur_Joy 'incremente le compteur
if Compteur_Joy > 60 then 'si superieur a 60 on eteint, ~3 secondes
low B_EN
end if
else
high B_EN
Compteur_Joy = 0
b10 = b0
end if
bit0 = E_Klax
bit1 = E_Phare
bit2 = E_sirene
bit3 = E_Gyro
bit4 = E_chgt
bit5 = E_camera
bit6 = E_debutant
bit7 = E_Opt
rfout B_DONNEE,(b0,b1,b2,b3,b4,b5,b6,b7) 'envoi des données par RF
loopPour moi, la sécurité maxi veut que l'on fasse le contrôle le plus en aval possible, c'est à dire au niveau du composant qui est le cœur du système, le 28X2 du récepteur.Mais faut voir à l'utilisation . il peut y avoir un signal faible sans forcement perte de com ( flag) , ou a l'inverse mauvaise com ( perte de flag) avec un signal fort ( harmonique par ex.) . je pense qu'il faudrait associer les deux . perte de flag , donc perte de com , en plus si le signal est perdu donc coupure du moteur un truc du genre .
#PICAXE 20M2
'#################################################################################
'########################## Programme Emetteur #############################
'#################################################################################
'########################## configuration ################################
' B_ pour Broche, c'est le nom ou est branché le composant
' E_ pour Etat, c'est la valeur de la broche
' V_ pour variable, ou est enregistrée l'Etat de la broche
'b0 à b7 pour les infos envoyés
'b8 avertissement des piles
'b9 calcul des joysticks
'b10 sauvegarde des TOR
symbol B_DONNEE = B.0
symbol B_Led = C.0
symbol B_Pile = C.1
symbol B_EN = C.7
symbol E_debutant = pinB.1
symbol E_chgt = pinB.2
symbol E_sirene = pinB.4
symbol E_Phare = pinB.6
symbol E_Gyro = pinB.7
symbol E_Opt = pinC.4
symbol E_Klax = pinC.5
symbol E_camera = pinC.6
symbol V_Joystick = w13
symbol V_Pile = b8
symbol Compteur_Joy = b9
dirsB = %00000001 'declare B.0 en sortie
dirsC = %10000001 'declare C.0 et C.7 en sortie
'########################## Initialisation ################################
setfreq m32 'Mets la freq à 32Mhz, RFout se met a 4 mzh puis repasse à 32Mhz
low B_EN ' On desactive le TX au depart
'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
readadc C.3,b1 'Av/ar voiture
readadc C.2,b3 'Dr/ga voiture
readadc B.3,b5 'pan de la caméra
readadc B.5,b7 'Tilt de la caméra
bit0 = E_Klax
bit1 = E_Phare
bit2 = E_sirene
bit3 = E_Gyro
bit4 = E_chgt
bit5 = E_camera
bit6 = E_debutant
bit7 = E_Opt
rfout B_DONNEE,(b0,b1,b2,b3,b4,b5,b6,b7) 'envoi des données par RF
'contrôle batterie -------------------------------------------------
readadc B_pile, V_Pile ' Lecture valeur des piles
if V_Pile < 90 then ' Avertissement piles usagées
high B_Led ' Correspond a 7 V au lieu de 7.2V
end if
'test emission ------------------------------------------------------
V_Joystick = b1+b3+b5+b7 ' Calcul de la position des joysticks-point milieu 126+125+129+129 = 509
if V_Joystick <507 or V_Joystick>511 or b10<> b0 then 'si action sur commandes
time = 0 : high B_EN
elseif time > 3 then 'sinon, si T superieur a 3s on eteint l'emetteur
low B_EN
end if
b10 = b0
loopEffectivement , j'ai pris le reflexe de mettre mes variables à 0 au démarrage, pour etre tranquille . Je me le note quelques part ;en initialisation tu écris b10 = b0
ça ne sert strictement à rien, puisque lors du démarrage toutes les variables sont à 0, et que de toute façon tu n'as pas encore lu l'état de tes entrées, donc b0. !
Non les deux sont strictement équivalents.Pour moi le TX est tout le temps allumé , sauf quand rien n'est touché .
Pour toi le TX est eteint sauf quand on touche quelque choses .
Bien sûr! ça réduit les parasites, et ça économise l'énergie. Par contre, il faut bien entendu que les Gnd soient en commun en évitant de faire passer le GND signal par GND puissance servo et moteur. seule la caméra et son émetteur peuvent être sur une alim déconnectée.Donc jee me demande, si je ferais pas mieuxde les alimenter par une pile au lithium de 3.6V plutot . Ainsi je diviserais mes alims servo et moteur de l'electronique ! est ce vous pensez que ca peut ameliorer le focntionnement général, si oui est ce que je dois mettre la masse en commuin dans ce cas la ?
Ok je vais faire ca alors !! comme ca je vire le regulateur ! .en évitant de faire passer le GND signal par GND puissance servo et moteur
Mais s'il sont commun forcement l'un passe dans l'autre ?en évitant de faire passer le GND signal par GND puissance servo et moteur
Non. il faut distribuer tes tensions en étoile. Le câble ou la piste qui distribue le signal ne doit pas être traversé par l'intensité consommée par l'utilisation puissance.Mais s'il sont commun forcement l'un passe dans l'autre ?
Par signal , tu veux dire la commande ? Par exemple la piste du va du 28X2 a la commande servo ?Le câble ou la piste qui distribue le signal
La je comprends pas ! l'intensité va du + au - .Elle va au plus court ? comment differencier cela , vu que le moins est commun ? par la distance ?ne doit pas être traversé par l'intensité consommée par l'utilisation puissance.
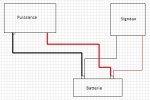
Si tu as un circuit puisssance comme un servo, le + et le GND servo doivent être reliés directement à ta batterie 7.2V. Le cable GND au - batterie ne doit pas véhiculer le signal.C'est vrai qu'un schéma est souvent "parlant" qu'un laius .
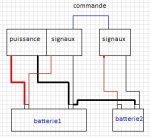
Je suis en train de me tirer les cheveux pour refaire tout le typon . Mais en fait mon probléme est un peu different Michel , car je dois disposé de deux alimentations ! . Ton schéma n'en propose qu'une ; La ou j'ai du mal a comprendre c'est comment differencier les deux masses alors qu'elles sont communes ! .
Jesuis en train d'essayer de faire deux circuits séparés, pour les reliés par un strap a la fin . je sais pas si ce seras bon ;
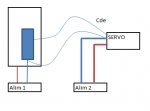 Si l'entrée servo ne prévoit pas d'entrée spécifique pour le - de la commande, il faut faire en sorte d'utiliser le minimum de câble commun avec la puissance.
Si l'entrée servo ne prévoit pas d'entrée spécifique pour le - de la commande, il faut faire en sorte d'utiliser le minimum de câble commun avec la puissance.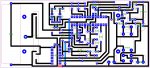
surtout l'idée de Georges, qui tiens plus du professionnalisme que du débutantisme lol
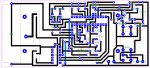
Rrrooohhhhh ! la vache . Je prends cher la !! . Ce que tu viens de me mettre .Surtout quand je vois les soirées que j'ai passé dessus ....... .Je me contenterai d'une réponse très soft : pas génial ! Implantations, routage, pistes, plan de masse, pas grand chose de bon.
effectivement pas compliqué , mais long très long. Et puis j'ai pas de double faceEt ne me dit pas que c'est compliqué, hein !...
.Ca par exemple je savais pas.et en plus tu as des pistes de 1mm de large quelque soit ce qui passe. Il faut éviter de faire cavaler des ampères un peu partout.
en fait, avant d'imprimer le typon j'enleve certaines pistes de masse, afin d'avoir les grosses parties blanches comme masse . ainsi sous le RX j'avais beaucoup de cuivre .On a déjà dit aussi que sous le TX il était conseillé d'avoir un plan de masse
Oui, mais l'antenne je ne peux pas la mettre sur un coté cor elle seras sur l'étage supérieur avec son plan de masse ; je peux faire un fil tout tordu qui va du milieu du dessus , au dessous sur le coté, mais du coup c'est le coax qui seras long .Connexion la plus courte possible avec l'antenne...
Je pense qu'il y as un truc qui m'échappe dans ce cas ; Car les servos ( direction,pan et tilt ) se trouve a l'avant , le moteur a l'arrière . Je ne peux donc pas tout regrouper . mais qu'est ce qui est le plus important, est-ce le fil qui relis, par exemple les servos au PCB(les trois couleurs) , ou la piste qui va du µC aux connecteurs des servos ? il faudra bien faire un choix.donc regrouper toutes tes sorties Moteur, Servo, et gros consommateurs ensemble.
Ben oui, c'est ce qui fais le plus mal . car j'avais réfléchis, et j'ai passé des heures a tout essayé de faire propre! Autant des fois je me suis précipité , je l'accorde, car avant de rentré a la maison pour le week end je voulais faire ca ou ci pour pouvoir bossé dessus à la maison;il faut prendre le temps de réfléchir avant de graver du cuivre.
Oui tu as raison. je fais faire un truc simple . Je reste comme j'étais ! c'était pas si mal .Fais un ruc simple, en attendant :
C'est le circuit imprimé qui est important.est-ce le fil qui relis, par exemple les servos au PCB(les trois couleurs) , ou la piste qui va du µC aux connecteurs des servos ? il faudra bien faire un choix.
Faire propre n'est pas synonyme d'esthétique, mais de fonctionnel.car j'avais réfléchis, et j'ai passé des heures a tout essayé de faire propre!
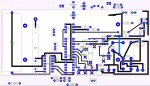
Non, évite les trucs "flottants".ou laissé un morceaux de cuivre ( sans forcement qu'il soit à la masse ) .
Pas grave, on est sur de courtes longueurs, donc ...Les diodes de roue libre ( HP, relais, servo) voient passées beaucoup de courant, mais trés rapidement , la largeur doit elle etre grosse ? je laisse à 50 ou je reduis a 30 ?
Pas compris la question, là ?Une autre , faut il mieux agrandir les pattes des composants pour diminuer les pistes sur le typon , ou le contraire .
Un bon dessin vaux mieux qu'un long discours . 1 ou 2 ?Pas compris la question, là ?