et voila .
le programme qui va avec :
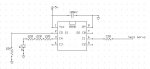
Donc 3 Resistances de 220 = 660 ohms . c'est une led rouge que tu as ?
Le but , a l'allumage du picaxe la led va s'allumée 1/2 secondes . et apres elle s'éteint . si pendant que le servo tourne, la led s'allume c'est que le picaxe a reseter et donc y'as bug dans le circuit .
Ps: un peu plus longue les vidéos niveaux temps plz .
PS2 : les régulateurs sont a part??!! , ce serait pas mal d'avoir une vue de tout l'ensemble , surtout que le problème a l'air d'être plutôt coté alimentation ?
J'ai bugger au niveau du message ! lol ; il faut branché la led sur la pin C.4
le programme qui va avec :
Code:
#Picaxe 08M2
'########################## Initialisation ################################
setfreq m4
high C.4 ' allume la LEd
pause 500
low C.4 ' Eteint la led
servo C.1,150 ' Initialsiation du servo au point milieu
pause 1000
'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
servopos C.1, 150 ' on positionne le servo au point milieu
pause 3000 ' Pause de 3 secondes
servopos C.1, 100 ' on positionne le servo en bout de course
pause 3000 ' Pause de 3 secondes
servopos C.1, 150 ' on positionne le servo au point milieu
pause 3000 ' Pause de 3 secondes
servopos C.1, 200 ' on positionne le servo en bout de course
pause 3000 ' Pause de 3 secondes
loopLe but , a l'allumage du picaxe la led va s'allumée 1/2 secondes . et apres elle s'éteint . si pendant que le servo tourne, la led s'allume c'est que le picaxe a reseter et donc y'as bug dans le circuit .
Ps: un peu plus longue les vidéos niveaux temps plz .
PS2 : les régulateurs sont a part??!! , ce serait pas mal d'avoir une vue de tout l'ensemble , surtout que le problème a l'air d'être plutôt coté alimentation ?
J'ai bugger au niveau du message ! lol ; il faut branché la led sur la pin C.4
Last edited:


 )
)