Bonsoir ludo ,
Je te propose avant d'aller plus loin de découpler l'alimentation de tes servo .
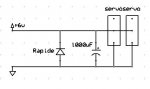
Voici un petit schéma : ca te couteras 1 condensateur et une diode rapide . le condo le plus prêt possible de ton servo
Je ne m'y connais pas trop en servo , mais au vu du prix, ca devrait etre de la qualité quand même ;
Sinon pour le pwm ou pulsout oui ca se ferais en logiciel ( soft) . mais je suis presque sur que si tu decouple correctement tu n'auras plus ces tremblements ; Je vais suivre ton post car j'utilise aussi des servos sur mon projet , et la commande pulsout ou pwm m'interresse , si on obtient de meilleurs resultats !!!
Je te propose avant d'aller plus loin de découpler l'alimentation de tes servo .
Voici un petit schéma : ca te couteras 1 condensateur et une diode rapide . le condo le plus prêt possible de ton servo
Je ne m'y connais pas trop en servo , mais au vu du prix, ca devrait etre de la qualité quand même ;
Sinon pour le pwm ou pulsout oui ca se ferais en logiciel ( soft) . mais je suis presque sur que si tu decouple correctement tu n'auras plus ces tremblements ; Je vais suivre ton post car j'utilise aussi des servos sur mon projet , et la commande pulsout ou pwm m'interresse , si on obtient de meilleurs resultats !!!
") )
)