Evening all,
Whilst playing around with some bits for my altimeter project, I decided it would be a good idea if the PICAXE, once finished logging, could power itself and the rest of the circuitry down completely, or as completely as possible.
After coming up with the following two ideas for doing this, neither of them work. Does anyone have any other ideas as to how I could get this to work?
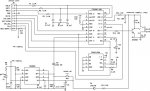
Circuit 1:

- The PTM is pressed and the transistor allows power down through the regulator to power up the PICAXE. The PICAXE immediately sends pin6 HIGH to hold the transistor base high, thereby keeping the circuit latched. To power down, the PICAXE sends pin6 LOW.
- Problem: It doesn't latch.
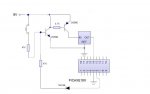
Circuit 2:

- The PTM is pressed and the thyristor latches. Power is allowed through the reg and the PICAXE powers up. When the program is complete, the PICAXE sends pin6 HIGH to unlatch the thyristor and power down the system.
- Problem: It doesn't unlatch.
Bearing in mind this must be a low power & low weight solution, a relay is unfortunately not a viable option.
Any thoughts on this appreciated!
Jon
Whilst playing around with some bits for my altimeter project, I decided it would be a good idea if the PICAXE, once finished logging, could power itself and the rest of the circuitry down completely, or as completely as possible.
After coming up with the following two ideas for doing this, neither of them work. Does anyone have any other ideas as to how I could get this to work?
Circuit 1:
- The PTM is pressed and the transistor allows power down through the regulator to power up the PICAXE. The PICAXE immediately sends pin6 HIGH to hold the transistor base high, thereby keeping the circuit latched. To power down, the PICAXE sends pin6 LOW.
- Problem: It doesn't latch.
Circuit 2:
- The PTM is pressed and the thyristor latches. Power is allowed through the reg and the PICAXE powers up. When the program is complete, the PICAXE sends pin6 HIGH to unlatch the thyristor and power down the system.
- Problem: It doesn't unlatch.
Bearing in mind this must be a low power & low weight solution, a relay is unfortunately not a viable option.
Any thoughts on this appreciated!
Jon
")