"EL Skorpiano"
 (Q:-...how can i enlarge my pictures in the post ?)
(Q:-...how can i enlarge my pictures in the post ?)
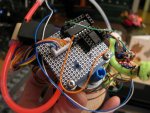
This is a project based on Picaxe 08M2 chips.
It is an Autonomous Robot using Stepper motors and Infra Red Leds as sensors
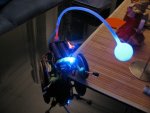
Below is its third support leg..... a Glowstick enables a smooth transit over bumps and curves..(and excuse to break a glow stick)

It has both Left and right Brain halves - both programmed with complementary but opposite coding.
Its Right InfraRed Eye is connected to its Right Brain (Artistic side) and controls the Left stepper motor.
Its Left IR Eye is connected to its Left Brain (Logical side) and controls the Right side stepper motor.
Right Brain Code :-
(Q:-...how can i enlarge my pictures in the post ?)This is a project based on Picaxe 08M2 chips.
It is an Autonomous Robot using Stepper motors and Infra Red Leds as sensors
It has both Left and right Brain halves - both programmed with complementary but opposite coding.
Its Right InfraRed Eye is connected to its Right Brain (Artistic side) and controls the Left stepper motor.
Its Left IR Eye is connected to its Left Brain (Logical side) and controls the Right side stepper motor.
Right Brain Code :-
Code:
;"EL Skorpiano"
; Right Brain Sub 20 Dollar Robot
; Picaxe 08M2
; www.picaxe.com <Gareth> - aka youtube "Chiprobot"
Main:
disconnect ; free_s up the programming pin so you get extra pins for sensors
; (hard reset required to program chip again though)
Wave:
dirs = %00010111 ; Set pin directions - 4 for stepper - 2 for input devices
for b0 = 0 to 999 ; Give robot a limited life ...."thousand clicks"
for b1 = 0 to 3 ; Stepper sequence count
if pinC.5 =1 then ; Check to see if the Infra Red detector has found something
lookup b1,(%00000011,%00000110,%00010100,%00010001),b2 ; preload Reverse Stepper (high torque version) sequence
else
lookup b1,(%00010001,%00010100,%00000110,%00000011),b2 ; preload Normal Stepper (high torque version) sequence
endif
pins = b2 ; send to stepper motor
next b1 ; increment stepper sequence position
next b0 ; Next life "Tick"
Last edited: