hi, i had an idea of adding a pan&tilt into my robots, and came up with the duck, to test the idea on it using a 20x2, srf005 for ranging and 4 ldr for floor sesorhttp://www.youtube.com/watch?v=hy7Uj0t1Mlc&feature=plcp,
jinx
jinx
; *******************************
; ***** Sample Header File *****
; *******************************
; Filename: Qduck
; Date: 10/6/12
; File Version: 001.1
; Written by: jinx
; Function: autonomous roving bot
; Last Revision:
; Target PICAXE:20x2
; *******************************
#picaxe 20x2
#no_data
#no_table
'**********floor sens**************************
symbol olsens = 7
symbol lsens = 8
symbol rsens = 3
symbol orsens = 9
symbol rgtvalue = b9
symbol lftvalue = b8
symbol OLvalue = b7
symbol ORvalue = b6
symbol oldrtval = b14
symbol olsetval = b18
symbol lsetval = b15
symbol rsetval = b16
symbol orsetval = b17
'****** srf005 ******************************
symbol ping = b.1 ' Define output pin for Trigger pulse
symbol echo = c.0 ' Define input pin for Echo pulse
symbol range = w10
symbol caution = 20
'***** servo control ***********************
' pan servo
symbol pan = b.2
symbol rgt = 210
symbol cen = 150
symbol lft = 80
'***** tilt servo **************************
'*******************************************
symbol tilt = b.0
symbol T_up = 110
symbol T_dwn = 190
symbol Tcen = 155
'********************************************
' drive setting
'********************************************
symbol l_back_slow = 153
symbol l_back_fast = 200
symbol l_off = 148
symbol l_forward_slow = 141
symbol l_forward_fast = 128
symbol r_back_fast = 95
symbol r_back_slow = 130
symbol r_off = 141
symbol r_forward_slow = 155
symbol r_forward_fast = 220
symbol r = b.4
symbol l = b.3
symbol delay = 1000
symbol delay1 = 500
symbol led = c.5
symbol counter = b1
init:servo pan,cen
servo tilt,tcen
servo r, r_off
servo l, l_off
pause 30
gosub setsens
pause 1000
main:
high led ' floor led
do
for b1 =lft to rgt step 2
servopos pan,b1
readadc rsens,rgtvalue
readadc lsens,lftvalue
if rgtvalue < rsetval then gosub flturn
if lftvalue < lsetval then gosub frturn
pause 10
pulsout ping,2 ' produce 20uS trigger pulse (must be minimum of 10uS)
pulsin echo,1,range ' measures the range in 10uS steps
pause 10 ' recharge period after ranging completes
let range = range * 10 / 58
if range > caution then
gosub allclear 'if nothing ahead, drive forward
else
gosub direction 'if obstacle ahead then decide which way is better
end if
' now convert range to cm (divide by 5.8) or inches (divide by 14.8)
next b1
for b1 =rgt to lft step -2
servopos pan,b1
readadc rsens,rgtvalue
readadc lsens,lftvalue
if rgtvalue < rsetval then gosub flturn
if lftvalue < lsetval then gosub frturn
pause 10
pulsout ping,2 ' produce 20uS trigger pulse (must be minimum of 10uS)
pulsin echo,1,range ' measures the range in 10uS steps
pause 10 ' recharge period after ranging completes
let range = range * 10 / 58 ' now convert range to cm (divide by 5.8) or inches (divide by 14.8)
if range < 10 then gosub rgt90
if range > caution then
gosub allclear 'if nothing ahead, drive forward
else
gosub direction 'if obstacle ahead then decide which way is better
end if
next b1
loop
allclear: 'drive forward
servopos r, r_forward_slow
servopos l, l_forward_slow
return
direction:
gosub allstop
gosub llook 'look to lft side
pause 30
pulsout ping,2 'produce 20uS trigger pulse (must be minimum of 10Us)
pulsin echo,1,range 'measures the range in 10uS steps
pause 20 'recahrge period after ranging completes
let range = range*10/58 ' multiply by 10 then divide by 58
w2 = range
gosub allstop
servopos pan,cen
gosub rlook 'look rgt side
pause 30
pulsout ping,2 'produce 20uS trigger pulse (must be minimum of 10Us)
pulsin echo,1,range 'measures the range in 10uS steps
pause 20 'recahrge period after ranging completes
let range = range*10/58 ' multiply by 10 then divide by 58
w3 = range
gosub allstop
servopos pan,cen
if w2<caution and w3<caution then
gosub bck
else
gosub decide
end if
return
decide:
if w2<w3 then
gosub rturn
else
gosub lturn
end if
return
Lturn:
pause 30
servopos l, l_off
servopos r, r_off
pause 30
gosub bck
pause 30
gosub lft90
return
Rturn:
pause 30
servopos l, l_off
servopos r, r_off
pause 30
gosub bck
pause 30
gosub rgt90
return
frturn:
pause 30
servopos l, l_off
servopos r, r_off
pause 30
gosub bck
pause 30
gosub lft180
return
lft90:
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_back_slow
servopos r,r_forward_slow
pause delay
return
lft180:
servopos r, r_off
servopos l, l_off
pause 30
gosub bck
pause 30
servopos l,l_back_slow
servopos r,r_forward_slow
pause 4900
return
flturn:
pause 30
servopos l, l_off
servopos r, r_off
pause 30
gosub bck
pause 30
gosub rgt180
return
rgt90:
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_forward_slow
servopos r,r_back_slow
pause delay
return
rgt180:
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_forward_slow
servopos r,r_back_slow
pause 4900
return
llook:
servopos pan,lft
pause 300
return
rlook:servopos pan,rgt
pause 300
return
bck:
servopos r, r_back_slow
servopos l, l_back_slow
pause 1000
return
allstop:
servopos r, r_off
servopos l, l_off
pause 30
return
setsens:
sertxd("sensing floor",13,10)
high led
for counter = 1 to 3
pause 500
readadc lsens,lsetval
readadc olsens,olsetval
readadc rsens,rsetval
readadc olsens,olsetval
next counter
rsetval = rsetval - 10
lsetval = lsetval - 10
olsetval = olsetval - 10
orsetval = orsetval - 10
pause 100
return

#picaxe 28x2
' Converted by X2 Conversion Wizard Version 2.0.5 (2010r4.1)
let dirsB = %11111111
let adcsetup = 0
; *******************************
; ***** Sample Header File *****
; *******************************
; Filename: Qduck slot3
; Date: 10/6/12
; File Version: 001.1
; Written by: jinx
; Function: autonomous roving bot
; Last Revision:
; Target PICAXE: 20x2
; *******************************
'***** servo control ***********************
' pan servo
symbol pan = b.4
symbol rgt = 210
symbol cen = 150
symbol lft = 80
'***** tilt servo **************************
'*******************************************
symbol tilt = b.5
symbol T_up = 120
symbol T_dwn = 190
symbol Tcen = 155
'********************************************
' drive setting
'********************************************
symbol l_back_slow = 153
symbol l_back_fast = 200
symbol l_off = 148
symbol l_forward_slow = 141
symbol l_forward_fast = 128
symbol r_back_fast = 95
symbol r_back_slow = 130
symbol r_off = 141
symbol r_forward_slow = 155
symbol r_forward_fast = 220
symbol r = b.6
symbol l = b.7
symbol delay = 1000
symbol delay1 = 500
symbol led = c.1
symbol infra = b1
main: do
servo r, r_off
servo l, l_off
pause 20
select case infra
case 1
gosub allstop
case 2
gosub lft90
case 3
gosub bck
case 4
gosub allstop
case 5
gosub fward
case 6
gosub rgt90
end select
gosub getdata
loop
getdata:
low b.6
low b.7
irin C.4, infra ;wait for new signal
pause 10
return
fward: sertxd(" forward ",13,10)
servopos r, r_forward_slow
servopos l, l_forward_slow
pause 1000
return
lft90:
sertxd(" lft90 ",13,10)
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_back_slow
servopos r,r_forward_slow
pause 2200
return
lft180: sertxd(" lft180 ",13,10)
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_back_slow
servopos r,r_forward_slow
pause 4900
return
rgt90: sertxd(" rgt90 ",13,10)
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_forward_slow
servopos r,r_back_slow
pause 2200
return
rgt180: sertxd(" rgt180 ",13,10)
servopos r, r_off
servopos l, l_off
pause 30
servopos l,l_forward_slow
servopos r,r_back_slow
pause 4900
return
bck: sertxd(" bck ",13,10)
servopos r, r_back_slow
servopos l, l_back_slow
pause 1000
return
allstop: sertxd(" allstop ",13,10)
servopos r, r_off
servopos l, l_off
pause 30
returnThe first test code I tested wasPerhaps adding a simple timeout will resolve things ?
symbol infra = b1
main:
irin [1000,main],C.4,infra
select case infra
case 1
gosub allstop
case 2
gosub lft90
case 3
gosub bckknowing that irin can compete for the timers that the servo's so I built a serial ir recieverHow were you doing it when not connected

 some time ago now and basicly 08m2 sits waiting for an input then the 08m2 then flags a pin on the 28x2 when ready send a byte. then the 28x2 used the " select case "
some time ago now and basicly 08m2 sits waiting for an input then the 08m2 then flags a pin on the 28x2 when ready send a byte. then the 28x2 used the " select case "init:
servo pan,cen
servo tilt,tcen
servo r, r_off
servo l, l_off
pause 30
pause 1000
do
pause 100
if irflag = 1 then gosub getdata
' so go get it
select case cmnd ' and move accordingly
case 1
gosub allstop
case 2
gosub T_rgt
case 3
gosub bck
' case 4
' gosub rgt90
case 5
gosub fward
case 6
gosub T_lft
end select
loop
'
'########### subroutines ###############
getdata:
pulsout toir,5
serin fromir,n2400_8,cmnd
pause 20
return
fward:
servopos r, r_forward_slow
servopos l, l_forward_slow
return
T_lft:
servopos l,l_back_slow
servopos r,r_forward_slow
return
T_rgt:
servopos l,l_forward_slow
servopos r,r_back_slow
return
bck:
servopos r, r_back_slow
servopos l, l_back_slow
return
allstop:
servopos r, r_off
servopos l, l_off
return; *******************************
; ***** Sample Header File *****
; *******************************
; Filename:
; Date:
; File Version:
; Written by:
; Function:
; Last Revision:
; Target PICAXE:
; *******************************
#picaxe 18m2
#com 3
symbol cmnd = b14
symbol junk= w10
symbol toduck = c.6
symbol fromduck = c.7
symbol trsens = w3
symbol tlsens = w5
symbol lts = b.7
symbol rts = b.6
symbol delay = 100
init: pause 100
gosub setTsens
pause 100
main:
do
touch16 rts,w3
if w3 > w1 then
let cmnd = 20
gosub senddata
pause 10
endif
touch16 lts,w5
if w5 > w2 then
let cmnd = 10
gosub senddata
pause 10
endif
loop
senddata:
pause 10
high toduck ' tell MP that data is available
pulsin fromduck,1, junk ' junk is junk; we're just waiting
low toduck ' prepare to send data
serout toduck,N2400_4,(cmnd)
pause 10
return
let cmnd = 0
return
setTsens:
touch16 b.6,w1 'set right sensor
let w1 = w1 + 150
pause 10
touch16 b.7,w2 'set left sensor
let w2 = w2 + 200
pause 10
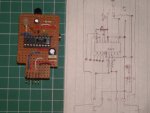
returnpaix not sure i follow the schematic could have been better " AM at chapter 2 of the designspark manual the symbols of the bottom is the ground"right" and battery input on the left. Both c.2 and c.5 are the pins on the master picaxe 28x2, The one mistake I 've seen in the layout for the bi-led it's connected to b.3 and b.0 not the ground as indicated "had no tipex".but I did notice that following the positive and negative leads from C1 and C2 to the bottom of the diagram, as shown, they both end up at a ground symbol
")