robert.higginson
New Member
Hi,
I have played around with the buggy and school experimenter boards and feel confident enough to start creating my own individual project. I have an old battery operated dog that I feel would be a good project to start with. I need a system to control the 3 motors (forward and backwards), 2 LEDS, and a few sensors (what types these would be?) to detect if anything is in front of it, and ... , if possible ..., to be able to play tunes like the 08M chip.
I was thinking that the PICAXE-18M would be the best choice since my idea would be similar to the buggy (MOD001) I have been using. The dog would roam around the room trying not to hit things and making appropriate noises.
I would like to use a pre-made project board as a starting point but I do not seem able to find one that will enable me to drive 3 motors so I am looking for suggestions on how to proceed or find information.
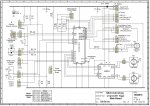
If anyone could supply a circuit diagram that would be very helpful as I'll have a go at making up the board if need be.
Thanks - in anticipation
I have played around with the buggy and school experimenter boards and feel confident enough to start creating my own individual project. I have an old battery operated dog that I feel would be a good project to start with. I need a system to control the 3 motors (forward and backwards), 2 LEDS, and a few sensors (what types these would be?) to detect if anything is in front of it, and ... , if possible ..., to be able to play tunes like the 08M chip.
I was thinking that the PICAXE-18M would be the best choice since my idea would be similar to the buggy (MOD001) I have been using. The dog would roam around the room trying not to hit things and making appropriate noises.
I would like to use a pre-made project board as a starting point but I do not seem able to find one that will enable me to drive 3 motors so I am looking for suggestions on how to proceed or find information.
If anyone could supply a circuit diagram that would be very helpful as I'll have a go at making up the board if need be.
Thanks - in anticipation