Bonjour tout le monde,
Est-ce que quelqu'un pourrait me dire si le montage ( à base d'un 18M2 et d'un L293D ) en pièce jointe est bon ?
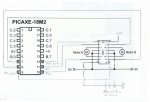
Je désire commander deux petits moto-réducteurs à courant continu pour faire avancer un petit robot.
Je relie les sorties pwm ( B.3 et B.6 ) du 18M2 sur les entrées Enable 1 et 2 ( pattes 1 et 9 ) du L293D pour faire varier la vitesse des deux moto-réducteurs.
Les sorties B.5 et B.4 du 18M2 pour faire tourner le moteur A, les sorties B.1 et B.2 pour faire tourner le moteur B.
Une alim extérieure sur la broche 8 du L293D pour le moteur.
J'ai également deux questions :
Premièrement : pour faire varier la fréquence de rotation des moteurs, est-il plus judicieux d'utiliser les sorties pwm du 18M2 sur les entrées Enable 1 et 2 du L293D ou de relier ces dernières au +5V et d'utiliser plus simplement la fonction pulsout ?
Secondement : j'ai lu ça et là qu'il était utile de mettre un condensateur sur les moteurs ( pour les parasites visiblement ), mais de quelle valeur et où les mettre exactement ( directement sur le moteur ou sur les sorties du L293D ? ) ?
Merci d'avance.
Est-ce que quelqu'un pourrait me dire si le montage ( à base d'un 18M2 et d'un L293D ) en pièce jointe est bon ?
Je désire commander deux petits moto-réducteurs à courant continu pour faire avancer un petit robot.
Je relie les sorties pwm ( B.3 et B.6 ) du 18M2 sur les entrées Enable 1 et 2 ( pattes 1 et 9 ) du L293D pour faire varier la vitesse des deux moto-réducteurs.
Les sorties B.5 et B.4 du 18M2 pour faire tourner le moteur A, les sorties B.1 et B.2 pour faire tourner le moteur B.
Une alim extérieure sur la broche 8 du L293D pour le moteur.
J'ai également deux questions :
Premièrement : pour faire varier la fréquence de rotation des moteurs, est-il plus judicieux d'utiliser les sorties pwm du 18M2 sur les entrées Enable 1 et 2 du L293D ou de relier ces dernières au +5V et d'utiliser plus simplement la fonction pulsout ?
Secondement : j'ai lu ça et là qu'il était utile de mettre un condensateur sur les moteurs ( pour les parasites visiblement ), mais de quelle valeur et où les mettre exactement ( directement sur le moteur ou sur les sorties du L293D ? ) ?
Merci d'avance.
Attachments
-
 165.9 KB Views: 50
165.9 KB Views: 50
")
