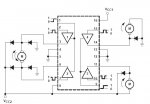
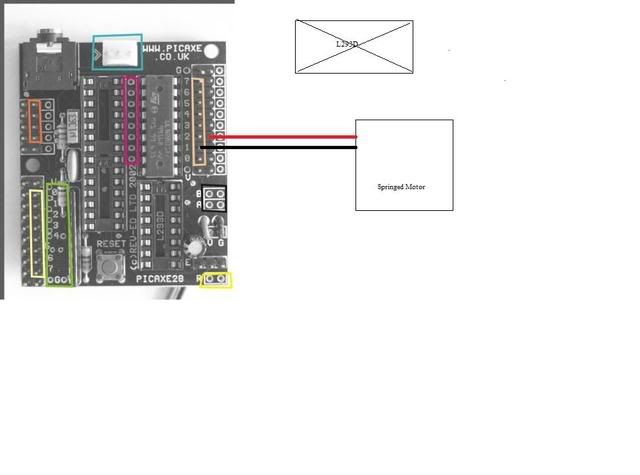
I have two L293Ds and one is in the default DIP socket on the actual board, and the other is external. The external chip, I wish to control four geared motors (they are GM10s if that makes any difference) How do I go about doing this? I already purchased these two radioshack products:
http://www.radioshack.com/product/index.jsp?productId=2062606&cp=&sr=1&kw=dip&origkw=dip&parentPage=search
and
http://www.radioshack.com/product/index.jsp?productId=2103799&cp=2032058.2032230.2032265&parentPage=family
What ports do I use on the chip? Is this even possible, to control 4 motors with one chip? How do I control these if it is? And where do I connect them (outputs, voltages, grounds... etc)
http://www.radioshack.com/product/index.jsp?productId=2062606&cp=&sr=1&kw=dip&origkw=dip&parentPage=search
and
http://www.radioshack.com/product/index.jsp?productId=2103799&cp=2032058.2032230.2032265&parentPage=family
What ports do I use on the chip? Is this even possible, to control 4 motors with one chip? How do I control these if it is? And where do I connect them (outputs, voltages, grounds... etc)
")