Bonjour à tous,
La partie hard du VHL est en train de se faire et prend un peu de temps . En // j'aimerais voir avec vous, le création d'un head tracker .
une vidéo sera bien plus parlante:
Vidéo d'un head tracker
Encore une
Ce sujet à été vite abordé dans la création du prototype , et j'enviseage de passer à la création .
PieM à largement dégrossi le sujet : je vais donc essayer de faire un cahier des charges qui tiens la route .
le head tracker , sera relié par un fil a la télécommande. ( certainement alimentation + data si c'est possible)
Sur l'appui d'un BP ( sur la télécommande) , on passe en mode mouvement camera ; L'appui sur le BP initialise la position centrale de la camera , il faudrat donc que le tête soit perpendiculaire aux epaules lors de l'appui . Ainsi on evite d'avoir une reference spatiale.
Je desire bouger la camera sur 2 axes seulement . droite gauche , et haut et bas .
Je m'en referre à vous car je n'ai jamais utilisé ce genre de module . et je ne sais pas trop par ou commencer pour recuprere les données ;
Deja le module que faut il : je dispose de ca :
boussole 6D compensée
Gyro + accelormetre
magnetometre 3 axes
Acceleroremetre + gyro
Quel type de liaison est le plus adapté i2c ?
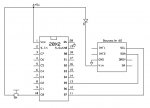
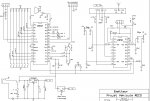
Voici le schéma de ma radiocmmande
Les infos devront etre sous forme de deux octets 1 pour pour le PAN et un pour le TIlt pour commander mes servos .
J'esepere ne rien oublier :
Merci
La partie hard du VHL est en train de se faire et prend un peu de temps . En // j'aimerais voir avec vous, le création d'un head tracker .
une vidéo sera bien plus parlante:
Vidéo d'un head tracker
Encore une
Ce sujet à été vite abordé dans la création du prototype , et j'enviseage de passer à la création .
PieM à largement dégrossi le sujet : je vais donc essayer de faire un cahier des charges qui tiens la route .
le head tracker , sera relié par un fil a la télécommande. ( certainement alimentation + data si c'est possible)
Sur l'appui d'un BP ( sur la télécommande) , on passe en mode mouvement camera ; L'appui sur le BP initialise la position centrale de la camera , il faudrat donc que le tête soit perpendiculaire aux epaules lors de l'appui . Ainsi on evite d'avoir une reference spatiale.
Je desire bouger la camera sur 2 axes seulement . droite gauche , et haut et bas .
Je m'en referre à vous car je n'ai jamais utilisé ce genre de module . et je ne sais pas trop par ou commencer pour recuprere les données ;
Deja le module que faut il : je dispose de ca :
boussole 6D compensée
Gyro + accelormetre
magnetometre 3 axes
Acceleroremetre + gyro
Quel type de liaison est le plus adapté i2c ?
Voici le schéma de ma radiocmmande
Les infos devront etre sous forme de deux octets 1 pour pour le PAN et un pour le TIlt pour commander mes servos .
J'esepere ne rien oublier :
Merci