Hi,
I am a new member of this forum and I want to learn something to program and control Picaxe.
Sorry for my english")
I have a 40X2 and I want to control two DC motors and three servos at the same time.
Question:
Which pins should I connect motors and servos to?
I created two program codes - one for motor control, the other for servo. Separately they work well, but when combined into one - servo ok, but the motor cannot be controlled (PWM).
Where is the error?
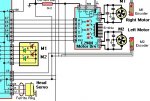
Connected pins:
motor - pin C.1 and B. 5 (driver L239D)
servo - pin B.1 or B.3 or B.6
external voltage sources, ground is common
thank you very much
I am a new member of this forum and I want to learn something to program and control Picaxe.
Sorry for my english
I have a 40X2 and I want to control two DC motors and three servos at the same time.
Question:
Which pins should I connect motors and servos to?
I created two program codes - one for motor control, the other for servo. Separately they work well, but when combined into one - servo ok, but the motor cannot be controlled (PWM).
Where is the error?
Connected pins:
motor - pin C.1 and B. 5 (driver L239D)
servo - pin B.1 or B.3 or B.6
external voltage sources, ground is common
thank you very much