Bonjour à tous.
J'ai un projet robotique pour mes élèves de 3e. Le but est d'organiser un concours basé sur un défi présenté dans le dossier A4 livré avec le cd du microrobot en page 83 FICHE N° 32 Programme F32-EJECTE_PLOTS.cad.
L'objectif est de pousser des plots d'une aire de jeu. Les plots sont détectés avec le capteur ultrasons(SRF 005 vendu par A4). Le robot ne doit pas sortir de l'aire grâce à un capteur de ligne (AXE121 vendu par A4).
J'ai aussi l'intention de rajouter des capteurs à contact microrupteur.
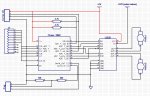
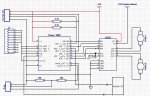
Es-ce que la carte "High Power 18 Project Board", équipé d'un 18M2 et d'un L293D est suffisante ?
Merci.
J'ai un projet robotique pour mes élèves de 3e. Le but est d'organiser un concours basé sur un défi présenté dans le dossier A4 livré avec le cd du microrobot en page 83 FICHE N° 32 Programme F32-EJECTE_PLOTS.cad.
L'objectif est de pousser des plots d'une aire de jeu. Les plots sont détectés avec le capteur ultrasons(SRF 005 vendu par A4). Le robot ne doit pas sortir de l'aire grâce à un capteur de ligne (AXE121 vendu par A4).
J'ai aussi l'intention de rajouter des capteurs à contact microrupteur.
Es-ce que la carte "High Power 18 Project Board", équipé d'un 18M2 et d'un L293D est suffisante ?
Merci.
") La commande de vitesse différentielle sur les deux moteurs peut être vue comme luxueuse dans certaines applications.
La commande de vitesse différentielle sur les deux moteurs peut être vue comme luxueuse dans certaines applications.