As some of may have noticed i have been fetling away on a project that not much has been said about, well not that I am getting to the point were i will be needing a little more help in chosing some of the final components i thought some of you may like to take a look at were i have gotten to so far.
First off a little machanical design.
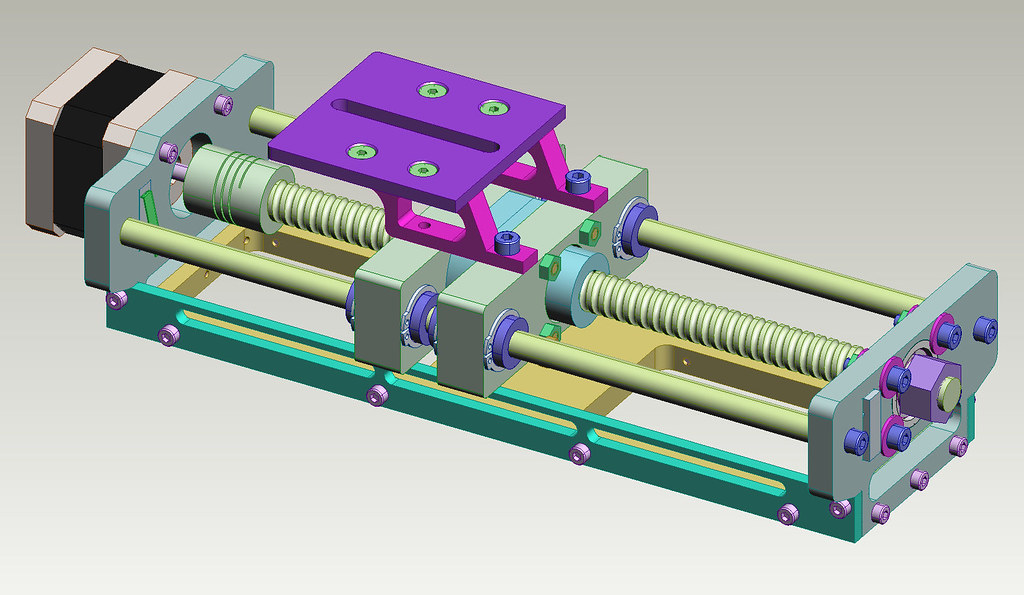
proto 6 - 1 by f2268d215cc925918731918f4efa0289, on Flickr
I have made use of a ball screw and thread to remove any chance of back lash. however the drawback is that it is easy to rotate the thread by push on the nut... this was easily resolved before i even notice the issue within the electronics for the bipolar stpper motor.
however before the foner detials of the lead screw were finalised i had decided to use a bipolar stepper motor, to move up to 4.5kg of mass. After a little reasearch i found that stepper motors come in various chassis sizes callend NEMA, nema 17 seemed about correct (same size as cognisys use). I found one on a well known auction site that was rated for 4.4kg/cm (0.431492n/m) holding torque. then came the challange of driving such a motor.
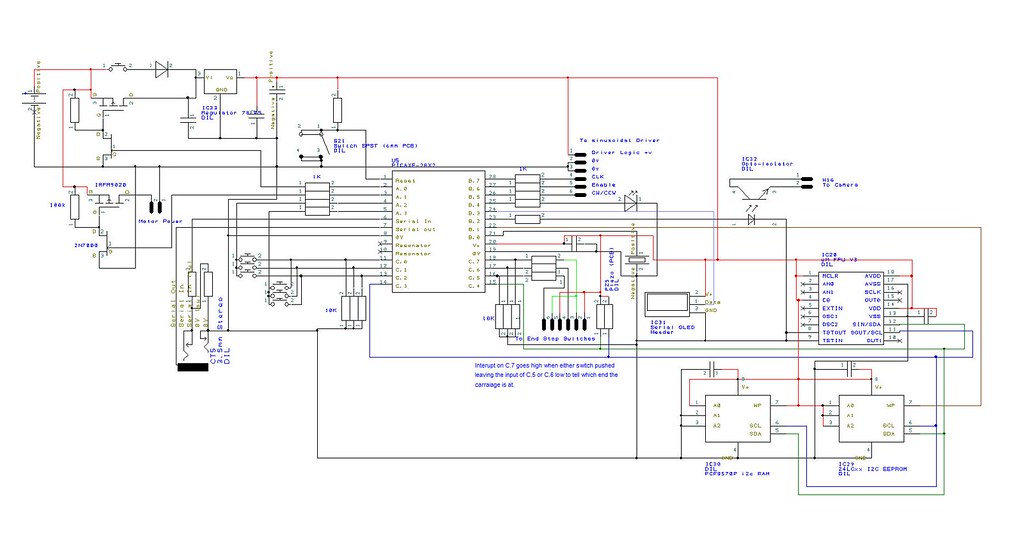
I went hunting for a way to drive it, the obvious route being through a pair of h bridges, but finding something suitable with a current rating of 1.68amp was proving dificult and expensive. after a little more reading one stepper world i thought using a mocro step controller may prove more apprpiate to what I amtrying to do. At first i tryed to design a micro step controller using a picaxe to generate the correct sine wave patterns, this proved difficult along with the normal expense of the H-brides and the picaxe. I ended up find several micro step controllers, in particular the THB6064AH, it was able to achieve very high presicion in regard to the number of micro steps per step, as many as 64 (64micro steps * 200 steps pre rotation = 12800 step total). The IC also has various duty cycles available too.
after sourcing the lead screw, motor and driver some basic maths insued, the pitch of the screw is 4mm - 4 / number of micro steps = distance traveled be each micro step
4 / 12800 = 0.0003125mm per micro step
it turns out i am going to be well beyound the normal mathmatical capabilities of the PICAXE, but then so would the calculations for the Depth of Feild. so the next step was learning how to use the micromega FPU
First off a little machanical design.
proto 6 - 1 by f2268d215cc925918731918f4efa0289, on Flickr
I have made use of a ball screw and thread to remove any chance of back lash. however the drawback is that it is easy to rotate the thread by push on the nut... this was easily resolved before i even notice the issue within the electronics for the bipolar stpper motor.
however before the foner detials of the lead screw were finalised i had decided to use a bipolar stepper motor, to move up to 4.5kg of mass. After a little reasearch i found that stepper motors come in various chassis sizes callend NEMA, nema 17 seemed about correct (same size as cognisys use). I found one on a well known auction site that was rated for 4.4kg/cm (0.431492n/m) holding torque. then came the challange of driving such a motor.
I went hunting for a way to drive it, the obvious route being through a pair of h bridges, but finding something suitable with a current rating of 1.68amp was proving dificult and expensive. after a little more reading one stepper world i thought using a mocro step controller may prove more apprpiate to what I amtrying to do. At first i tryed to design a micro step controller using a picaxe to generate the correct sine wave patterns, this proved difficult along with the normal expense of the H-brides and the picaxe. I ended up find several micro step controllers, in particular the THB6064AH, it was able to achieve very high presicion in regard to the number of micro steps per step, as many as 64 (64micro steps * 200 steps pre rotation = 12800 step total). The IC also has various duty cycles available too.
after sourcing the lead screw, motor and driver some basic maths insued, the pitch of the screw is 4mm - 4 / number of micro steps = distance traveled be each micro step
4 / 12800 = 0.0003125mm per micro step
it turns out i am going to be well beyound the normal mathmatical capabilities of the PICAXE, but then so would the calculations for the Depth of Feild. so the next step was learning how to use the micromega FPU