banderkerkoff
New Member
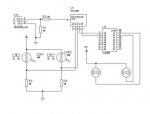
I´m trying to make a light sensor robot. It´s a simple circuit with a Picaxe 08 and a uln2803 to control two 13v dc motors.
The circuit is bilt with 2 LDRs controling each motor and making the robot turn right or left.
The left LDR sends HIGH or LOW to In3 and the rigth LDR does the same to In2.
It works good!!
The program generates high or low signals in out0 and out1 in the picaxe08.
The out0 really works good but the out1 works in a unstable mode. It changes its state with a delay and some times out1 never changes its state. Sometimes both outputs keep giving a hold state and I must reset the circuit to go out.
I´m using two diferent power supplies, one for picaxe a other for the motors.
I conect the serial in pin (2) to ground through a 10k resistor.
What am I doing wrong?
Thanks a lot
The circuit is bilt with 2 LDRs controling each motor and making the robot turn right or left.
The left LDR sends HIGH or LOW to In3 and the rigth LDR does the same to In2.
It works good!!
The program generates high or low signals in out0 and out1 in the picaxe08.
The out0 really works good but the out1 works in a unstable mode. It changes its state with a delay and some times out1 never changes its state. Sometimes both outputs keep giving a hold state and I must reset the circuit to go out.
I´m using two diferent power supplies, one for picaxe a other for the motors.
I conect the serial in pin (2) to ground through a 10k resistor.
What am I doing wrong?
Thanks a lot