Re "its beyond money,its for educational purposes"
The price is $12.50 here
http://www.acroname.com/robotics/parts/R48-IR12.html
That represents exceptional value. Much cheaper than the cost of building this with discrete parts.
Yes, you can build one from parts. I did once and the circuit has a range of about a metre and it works fine even under flouro lights.
First, you will need a CRO.
Second, you need a protoboard and a good collection of 324 op amps and resistors and capacitors and some 4016 cmos switches and some switch controls based on 555s.
The theory is that every bit of IR light is superimposed on a 50hz waveform from indoor lights, and the waveform is much bigger than the signal you are looking for.
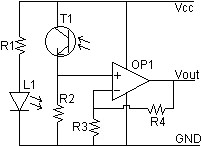
So you sample the light level, store that level in a sample and hold, then send out an IR pulse, then sample it again during the middle of that pulse, and then compare the two voltages and store that difference in a third sample and hold. A picaxe might be able to simplify this - it depends on the sample speed of the ADCs relative to the 50hz waveform. You do need a CRO for this sort of work as you need to see that waveform to visualise how to capture the data. Just put a CRO on the output of that opamp circuit you posted and fire some IR pulses in and see what happens.
Start with that circuit you posted and let us know how it performs on the protoboard.
 .
.