cactusface
Senior Member
Hi Folks,
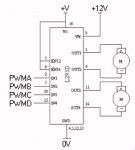
Just started on my second BuggyBot, hoping to use a 20x2 but will be testing on a 40x2 has this I have at the moment. I intend to use PWM in the form of HPWM, but having looked at the command! I'm a littleI lost. Most likely I will use an L293 driver for 2 small DC motors and use PWM on the enable pins. As I don't need to run the motors at different speeds, can I use just one HPWM output, looks like I can.
Or could the HPWM outputs be used to drive one side of the 2 L293 inputs?
The HPWM commands, Mode, Polarity, setting, etc... mode and setting almost seem to do the same thing??? Polarity I don't get at all
Please can one of you whizz boys (Hippy, Dippy) could put it in simple words for me, a couple of samples would give me a better idea.
KInd regards
Mel
Just started on my second BuggyBot, hoping to use a 20x2 but will be testing on a 40x2 has this I have at the moment. I intend to use PWM in the form of HPWM, but having looked at the command! I'm a littleI lost. Most likely I will use an L293 driver for 2 small DC motors and use PWM on the enable pins. As I don't need to run the motors at different speeds, can I use just one HPWM output, looks like I can.
Or could the HPWM outputs be used to drive one side of the 2 L293 inputs?
The HPWM commands, Mode, Polarity, setting, etc... mode and setting almost seem to do the same thing??? Polarity I don't get at all
Please can one of you whizz boys (Hippy, Dippy) could put it in simple words for me, a couple of samples would give me a better idea.
KInd regards
Mel
")