amateurman79
Member
Hi guys,
servo and readadc problem!
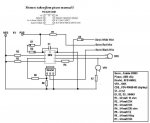
first time Ive used this command. My futaba s3003 just arrived and Checked it works with the code from the manual. But I want to turn a pot, and for the servo to sort of follow accordingly, any help appreciated.
Using a 100k pot on input 0.
servo and readadc problem!
first time Ive used this command. My futaba s3003 just arrived and Checked it works with the code from the manual. But I want to turn a pot, and for the servo to sort of follow accordingly, any help appreciated.
Using a 100k pot on input 0.
Code:
main:
servo 7, 75
readadc 0, b0
servopos 7,b0
goto main