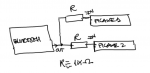
I am trying to build a robot from which a single Bluetooth sends signals to two 28x2. I have read a lot about it, and i have understood it'S possible ( Between Out of Bluetooth and IN of PICAXES a resistor of 1K)
Besides, i have to connect all 0'sV . I did it, but , in spite fo the two microphones receive the signal correctly, one of them restarts continuously, making a movement that should only happen once. I guess I have not properly connected the 0'sV. Could someone tell me how to do it right, please? I connected 0V between OUTS (C'S); (B'S); and Between INS(A'S)

I have read things in the forum about a micro restart in cases similar to this, but I am not able to find it now
Thanks in advance
Besides, i have to connect all 0'sV . I did it, but , in spite fo the two microphones receive the signal correctly, one of them restarts continuously, making a movement that should only happen once. I guess I have not properly connected the 0'sV. Could someone tell me how to do it right, please? I connected 0V between OUTS (C'S); (B'S); and Between INS(A'S)
I have read things in the forum about a micro restart in cases similar to this, but I am not able to find it now
Thanks in advance
Attachments
-
 74.4 KB Views: 19
74.4 KB Views: 19
Last edited:
")

