Bonjour,
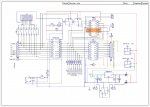
Suite à une proposition de schéma autour d'un 20M2 par PieM (ici), je me suis lancé dans la réalisation d'une carte qui correspond à mes besoins.
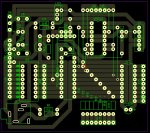
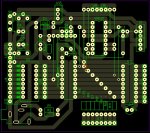
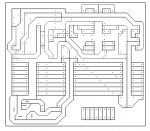
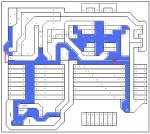
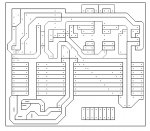
Le PCB de la carte en elle-même est finie et je commence la partie "carte fille" avec les connecteurs (c'est un choix de ma part de faire la carte en 2 parties, genre shield mais par en dessous).
Et j'arrive au délicat choix (déjà abordé sur ce forum, je sais, ici...) du choix de connectiques "élèves".
Or je me demandais s'il était pertinent de prévoir tout simplement des connectiques Grove (des modules Arduino du même nom...).
Si la réponse est oui, j'ai deux questions :
- Savez-vous si, en général, les modules Grove sont facilement utilisables sur Picaxe (les boutons et les LED, j'imagine que oui, mais les capteurs ultrason, les suiveurs de lignes, capteur de température, émetteur-récepteur IR etc... ?) car, sinon, ça a moins d'intérêt...
- Les connecteurs Grove ont 4 broches (V+, GND, S1, S2). Pensez-vous que je doive câbler systématiquement un connecteur pour deux entrées (ou sorties) ? Car au final, pour 16 E/S, ça ne me fera plus que 8 connecteurs... ça réduit sacrément les possibilités... qu'en pensez-vous ?
Merci d'avance !
Suite à une proposition de schéma autour d'un 20M2 par PieM (ici), je me suis lancé dans la réalisation d'une carte qui correspond à mes besoins.
Le PCB de la carte en elle-même est finie et je commence la partie "carte fille" avec les connecteurs (c'est un choix de ma part de faire la carte en 2 parties, genre shield mais par en dessous).
Et j'arrive au délicat choix (déjà abordé sur ce forum, je sais, ici...) du choix de connectiques "élèves".
Or je me demandais s'il était pertinent de prévoir tout simplement des connectiques Grove (des modules Arduino du même nom...).
Si la réponse est oui, j'ai deux questions :
- Savez-vous si, en général, les modules Grove sont facilement utilisables sur Picaxe (les boutons et les LED, j'imagine que oui, mais les capteurs ultrason, les suiveurs de lignes, capteur de température, émetteur-récepteur IR etc... ?) car, sinon, ça a moins d'intérêt...
- Les connecteurs Grove ont 4 broches (V+, GND, S1, S2). Pensez-vous que je doive câbler systématiquement un connecteur pour deux entrées (ou sorties) ? Car au final, pour 16 E/S, ça ne me fera plus que 8 connecteurs... ça réduit sacrément les possibilités... qu'en pensez-vous ?
Merci d'avance !