I have been working on some sensors to go with my high speed camera controller. now we all know about simple sensors, things like beam break and laser trip wire type things. which I is fine, providing you want the action to happen around the beam break. But a problem arises when you need to leave the system watch a trail that animals use. The camera has to be constantly active. the solutions is a set of sensors that have to be activated in the correct order. from here the idea extrapolated from having 2 sensors that the controller can watch and check activation order - a pair of "dumb" sensors. it could even watch for when both sensor are activated at the same time.
But what if I want more sensors, and maybe different sensors mixed. I imagined a system that could have as many sensors I like (with reason).
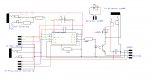
the current sensors are laser trip wires, with ability to use either and external or internal laser and able to address up to 250 sensors connected to the system in chain (meaning only 2 pins used instead of a pin for every sensor). There are currently 6 different modes that the sensors can run in, dumb, any sensor fire, far to near far, near to far fire, far wakes followed by far to near fire and near wakes followed near to far to fire. if the sensor does not receive correct comms from the controller it drops into a default dumb mode.
I am sure there will be some software updates to come as the controller software is further developed, but initial testing shows everything working as anticipated.
I hope to build a selection of sensors or different applications, hopefully this lays the ground work for those sensors meaning that that hard work is already done.
But what if I want more sensors, and maybe different sensors mixed. I imagined a system that could have as many sensors I like (with reason).
the current sensors are laser trip wires, with ability to use either and external or internal laser and able to address up to 250 sensors connected to the system in chain (meaning only 2 pins used instead of a pin for every sensor). There are currently 6 different modes that the sensors can run in, dumb, any sensor fire, far to near far, near to far fire, far wakes followed by far to near fire and near wakes followed near to far to fire. if the sensor does not receive correct comms from the controller it drops into a default dumb mode.
I am sure there will be some software updates to come as the controller software is further developed, but initial testing shows everything working as anticipated.
I hope to build a selection of sensors or different applications, hopefully this lays the ground work for those sensors meaning that that hard work is already done.
Attachments
-
18.9 KB Views: 11
-
 271 KB Views: 49
271 KB Views: 49