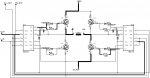
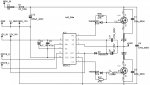
I need to control a 24V motor with an 18M2 high-power project board but using external FETs (SMP60N05) because of the power involved. I have got the motor running with PWM but need to be able to reverse it, hence the full bridge drive circuit. To avoid damaging either the motor or the FETs I would prefer if the 18M2 would check to see if speed is zero before reversing direction (and if not, ramp down to zero and wait 5secs to ensure the motor has stopped turning). I also need to have an emergency stop feature with a physical action required before it will reset (speed to zero then wait 5 seconds). Can anyone help with the additional software please ?
Attachments
-
12.8 KB Views: 32
-
11.4 KB Views: 19
")