Bonjour à tous
Je souhaites fabriquer un petit véhicule autonome piloté par une carte CHI030 (18M2).
Entrées/sorties :
- un capteur infrarouge pour avoir la possibilité de lui donner des ordres
- un capteur de distance à ultrasons
- 2 servos à rotation continue
- 1 mini servo pour l'orientation du capteur de distance
Je suis d'origine méca donc mes compétences en élec sont defficientes.
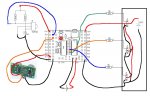
A partir des docs Picaxe, de la carte CHI030 et des différents capteurs, j'ai fait un croquis de cablage prévisionnel pour le soumettre aux experts du forum.
Mes doutes :
Les résistances barrées seront dessoudées ?
Faut-il mettre la résistance R6 330 ohms sur la partie IR ?
Faut-il mettre un ou plusieurs condensateurs 220 uF sur les servos (j'en ai mis un seul) ?
Les entrées choisies sont elles compatibles avec ce qui est branché dessus (pour le capteur à ultrasons mode 2 un seul fil par exemple) ?
Merci d'avance
Je souhaites fabriquer un petit véhicule autonome piloté par une carte CHI030 (18M2).
Entrées/sorties :
- un capteur infrarouge pour avoir la possibilité de lui donner des ordres
- un capteur de distance à ultrasons
- 2 servos à rotation continue
- 1 mini servo pour l'orientation du capteur de distance
Je suis d'origine méca donc mes compétences en élec sont defficientes.
A partir des docs Picaxe, de la carte CHI030 et des différents capteurs, j'ai fait un croquis de cablage prévisionnel pour le soumettre aux experts du forum.
Mes doutes :
Les résistances barrées seront dessoudées ?
Faut-il mettre la résistance R6 330 ohms sur la partie IR ?
Faut-il mettre un ou plusieurs condensateurs 220 uF sur les servos (j'en ai mis un seul) ?
Les entrées choisies sont elles compatibles avec ce qui est branché dessus (pour le capteur à ultrasons mode 2 un seul fil par exemple) ?
Merci d'avance
Attachments
-
 162.3 KB Views: 44
162.3 KB Views: 44

