First a word of introduction because I am new to this forum. I am a 72 year old retired mechanical engineer. During the spring, summer and fall my passions are fishing and giant scale radio control airplanes. During the winter I revert back to my interest in electronics. I earned my FCC license before I earned my driver’s license. I have successfully built the following Picaxe projects: servo tester, simple robot, towers of Hanoi, LED cube. The programming was a result of cut and paste then hacking until I got the things to work. Therefore let it be known at the outset that I am not a programing whiz.
This winter I would like to build a stopwatch/timer accurate to 0.01 seconds. The inspiration came from involvement in my grandson’s cub scout Pinewood Derby event. Simply described, a group of wooden cars are released, roll down a ramp then on to a straightaway with a finish line at the end.
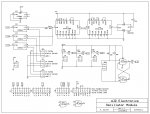
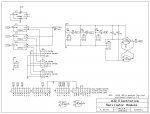
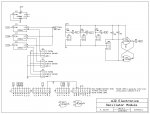
The attached block diagram illustrates where my thought process lies at this point in time. The oscillator section derives a series of 100 Hz pulses, thus 10 pulses = 0.1 sec, 15 pulses = 0.15 sec, 615 pulses = 6.15 seconds, etc.These pulses would be delivered to a microprocessor which would serialize the information and deliver it to a multiplexed LED display driver. The start of the timing sequence would be initiated by a limit switch at the starting gate. The end of the timing sequence would be determined when the car interrupts a photocell. Reset would be a simple push button.
I would appreciate any and all thoughts on the subject and any suggestions for changes at this stage of the game will be welcome.
This winter I would like to build a stopwatch/timer accurate to 0.01 seconds. The inspiration came from involvement in my grandson’s cub scout Pinewood Derby event. Simply described, a group of wooden cars are released, roll down a ramp then on to a straightaway with a finish line at the end.
The attached block diagram illustrates where my thought process lies at this point in time. The oscillator section derives a series of 100 Hz pulses, thus 10 pulses = 0.1 sec, 15 pulses = 0.15 sec, 615 pulses = 6.15 seconds, etc.These pulses would be delivered to a microprocessor which would serialize the information and deliver it to a multiplexed LED display driver. The start of the timing sequence would be initiated by a limit switch at the starting gate. The end of the timing sequence would be determined when the car interrupts a photocell. Reset would be a simple push button.
I would appreciate any and all thoughts on the subject and any suggestions for changes at this stage of the game will be welcome.
Attachments
-
175.3 KB Views: 62