After having been obtained a macro lense i was bondering what to photo graph with it. While looking around on the interent i found that several members had made electronic macro rail using picaxe, and old PC parts.
After looking around for a bit i found an old broken DVD RW and a half broken 20X2 (port b doesnt work). after a quick order of some L293D ICs and a question on the forum about its voltage i found myself by able to control the carriage of this old drive.
The main addition I have made is a couple of switches so the 20x2 knows whenthe carriage is at the extremes of the rails. well when i saw switches, bnot being able to find some light weight switches in maplin (I may order some at some point), i used some stripped wire and made contact on both the carriage and rail ends using some blu-tack. This made a sort of contact stop with +v being carried by the carriage.
With a little experimenting i found that the half step provided by the drives stepper motor wasn't really a half step, more like a 1/4 then 3/4 step, but with a single step only moving the carriage 0.15mm this wasn't an issue.
The internet led me to several pieces of stacking software, the one that came up most often was zerene, which i am using the trial of at the moment (I may plump the £60 for it at some point)
This i my first real attempt at macro photography
Results:

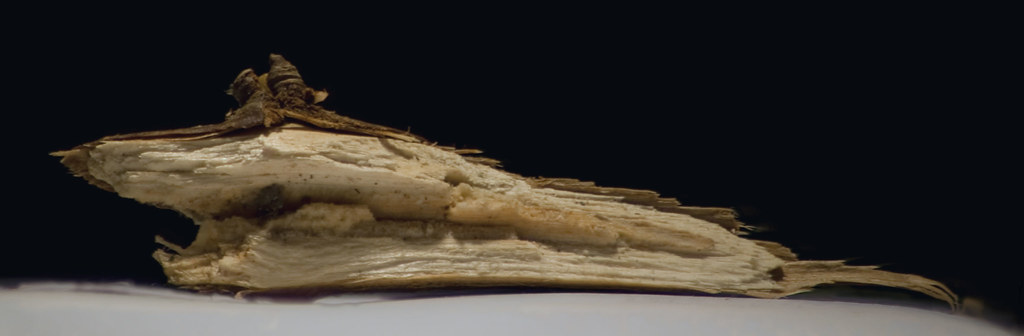
large-leaf by f2268d215cc925918731918f4efa0289, on Flickr
After looking around for a bit i found an old broken DVD RW and a half broken 20X2 (port b doesnt work). after a quick order of some L293D ICs and a question on the forum about its voltage i found myself by able to control the carriage of this old drive.
The main addition I have made is a couple of switches so the 20x2 knows whenthe carriage is at the extremes of the rails. well when i saw switches, bnot being able to find some light weight switches in maplin (I may order some at some point), i used some stripped wire and made contact on both the carriage and rail ends using some blu-tack. This made a sort of contact stop with +v being carried by the carriage.
With a little experimenting i found that the half step provided by the drives stepper motor wasn't really a half step, more like a 1/4 then 3/4 step, but with a single step only moving the carriage 0.15mm this wasn't an issue.
The internet led me to several pieces of stacking software, the one that came up most often was zerene, which i am using the trial of at the moment (I may plump the £60 for it at some point)
This i my first real attempt at macro photography
Results:
large-leaf by f2268d215cc925918731918f4efa0289, on Flickr
Attachments
-
 437.1 KB Views: 98
437.1 KB Views: 98 -
 220.8 KB Views: 90
220.8 KB Views: 90