Hello all, its been a while since I was last on here but I've returned with a query regards getting a servo to move slowly.
I'm trying to get a servo arm to move slowly between two points and then back again.
It works up to a point in that the servo does move slowly but not throughout the whole movement, for some reason it appears to speed up for a short part of the journey towards the middle of the arc in both directions
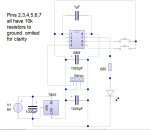
I've attached a circuit diagram and code is pasted below
What am I doing wrong ????
I'm trying to get a servo arm to move slowly between two points and then back again.
It works up to a point in that the servo does move slowly but not throughout the whole movement, for some reason it appears to speed up for a short part of the journey towards the middle of the arc in both directions
I've attached a circuit diagram and code is pasted below
What am I doing wrong ????
Code:
start:
high b.4
servo b.5,170
pause 1000
servo1:
for b1 = 170 to 130 step -1
servopos b.5,b1
pause 40
next b1
pause 2000
for b1= 130 to 170
servopos b.5,b1
pause 40
next b1
pause 2000
goto servo1Attachments
-
 22.1 KB Views: 98
22.1 KB Views: 98

")