cactusface
Senior Member
Hi,
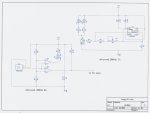
My buggy-bot kept bumping in to things when reversing, so I gave it some eyes, Infra-red ones. Fairly simple, a ICM555 cmos timer running at 38KHz, this drives an NPN transistor, which in turn drives the 2 IR Leds.
The receiver was a TSOP2438 device, this has an active LOW output, which can be confusing, and as I like all my signals the right way up?? I used an LM393 dual comparator to invert it to an HIGH. The other comparator then provides confirmation by lighting the Green Led.
I only needed to add one extra line to the program to check for an '1' on the input pin while in the reverse routine.
Here's a couple of images....
Hope it's useful
Regards
Cactusface
My buggy-bot kept bumping in to things when reversing, so I gave it some eyes, Infra-red ones. Fairly simple, a ICM555 cmos timer running at 38KHz, this drives an NPN transistor, which in turn drives the 2 IR Leds.
The receiver was a TSOP2438 device, this has an active LOW output, which can be confusing, and as I like all my signals the right way up?? I used an LM393 dual comparator to invert it to an HIGH. The other comparator then provides confirmation by lighting the Green Led.
I only needed to add one extra line to the program to check for an '1' on the input pin while in the reverse routine.
Here's a couple of images....
Hope it's useful
Regards
Cactusface
Attachments
-
 129 KB Views: 124
129 KB Views: 124 -
 113.4 KB Views: 131
113.4 KB Views: 131
")