I am working on a remote control tank and am having trouble getting the motors to work.
I am using a Picaxe 14M2 to work the motors and I entered these commands to test the motors:
left track moves forwards:
high b.2
low b.3
right track moves forwards:
high b.5
low b.4
left track moves backward:
high b.3
low b.2
right track moves backward:
high b.4
low b.5
The motors work fine when using one at a time, but when I try to make them work together, they don't do anything.
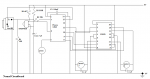
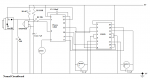
This is a schematic of my project:
This is how my project's code works.
I can get the infrared sensor on my project to work, but when I try to use the code to move both treads at once, they don't do anything. The remote I'm using can work the piezo buzzer though.
Any help would be appreciated.
I am using a Picaxe 14M2 to work the motors and I entered these commands to test the motors:
left track moves forwards:
high b.2
low b.3
right track moves forwards:
high b.5
low b.4
left track moves backward:
high b.3
low b.2
right track moves backward:
high b.4
low b.5
The motors work fine when using one at a time, but when I try to make them work together, they don't do anything.
This is a schematic of my project:
This is how my project's code works.
Code:
nomad:
irin c.2, b0
select case b0
case 18
high b.2
low b.3
high b.5
low b.4
case 19
high b.3
low b.2
high b.4
low b.5
case 16
high b.2
low b.3
high b.4
low b.5
case 17
high b.3
low b.2
high b.5
low b.4
case 94
tune c.0,8,($00)
tune c.0,8,($00)
tune c.0,8,($00)
end select
goto nomadAny help would be appreciated.
Last edited by a moderator: